
 Artificial Intelligence
Artificial Intelligence
Artificial Intelligence detects muscle stiffness and massages according to your current physical condition. The AI mechanism adjusts the massage to the optimal strength and time. The speed of movement is controlled based on the load received so that stiff areas get massaged more deeply and slowly.
 Air Massage
Air Massage
The air compression massage of the Inada Robo massage chair is unique. The AI mechanical air compression massage is located at the arms and calves. Airbags are also situated in the neck and shoulders, shoulders, back and lower back, seat and thighs, and feet.
 Five Finger Arm Massage
Five Finger Arm Massage
Three-dimensional movement is achieved by a combination of mechanics and AI that allows the Inada Robo to feel more human-like than traditional air compression arm massage. The AI Hybrid mechanism allows you to feel a kneading massage as if massaged by human hands.
 Bluetooth Speakers
Bluetooth Speakers
Connect your favorite smart device to the Inada Robo Massage Chair and enjoy music, audiobook, or even guided meditation through the Bluetooth speakers. Immerse your mind and body
 Body Scan Technology
Body Scan Technology
By simply sitting down in the Inada Robo massage chair, the shiatsu points are detected automatically and saved for each person. Regardless of height, body type, size, and shape of your muscle, the massage will be customized just for you.
 Five Finger Calf Massage
Five Finger Calf Massage
Your entire calves are loosened by up and down movement while grasping your calves. The AI Hybrid mechanism reproduces a professional massage by moving up and down, left and right, and back and forth like human hands.
 Face Recognition
Face Recognition
You can register yourself and family members with the touch tablet. It will ask for your info. Once you are registered, you can select your profile by clicking your nickname or use the automatic login with facial recognition. Once you sit in the Robo, it will recognize you automatically.
 Foot Massge
Foot Massge
Rollers underneath the soles of your feet loosen the soles with kneading while airbags hold your feet in place to prevent them from moving.
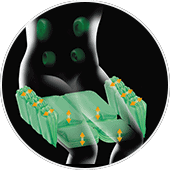 Glute Massage
Glute Massage
The AI Hybrid rollers extend down to the top of the buttocks to loosen the piriformis muscles in the areas of the gluteus maximus muscles and the sciatic nerve. Airbags on the sides of your thighs and seat to loosen muscles.
 Heat Therapy
Heat Therapy
The Inada Robo massage chair has heat pads located in the lumbar area. The heat helps to warm the core to promote blood circulation and loosens the muscles to prepare them for a massage.
 Hybrid Quad Style Roller
Hybrid Quad Style Roller
The Hybrid Quad Roller of the Inada Robo massage chair is designed to surpass the capabilities of the human hands. The roller allows the upper and lower part of the mechanism to operate independently, each with its own motor and intensity.
 Neck Shiatsu Massage
Neck Shiatsu Massage
While the base of your neck is secured, shiatsu like kneading massage pushes hard to loosen and stretch to relieve tension and pressure.
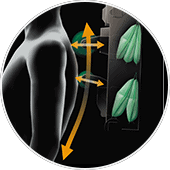
 S-Track With 4D Roller
S-Track With 4D Roller
The Inada Robo Massage Chair comes equipped with a track shaped like an “S” to follow the natural curvature of your spine. The S-Track allows for a consistent massage from the rollers. The 4D hybrid quad style rollers are the most humanistic rollers available. They move up and down, side to side, in and out, and have a variable speed of movement to mimic human hands.
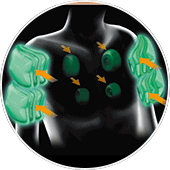 Shoulder Massage
Shoulder Massage
The shoulder massage is unique with the Inada Robo massage chair. Using Inada’s proprietary technology, lateral direction is achieved with airbags as the massage mechanism pushes firmly from behind to stimulate the shiatsu points, just like a real masseuse.
 Touch Screen Tablet
Touch Screen Tablet
The remote control of the Inada Robo massage chair is a touch screen tablet running their operating system. The touch tablet is intuitive and straightforward to use and all of the features right at your fingertips.
Shipping, Exchanges & Returns
Review the delivery options, inspection requirements, and 30-day exchange and return terms for TITTAC massage chairs.
Free Curbside Freight Delivery
Massage chairs include free curbside freight delivery to the 48 contiguous United States. Delivery is generally estimated at 7 to 10 days, but timing may vary by product availability, destination, and freight carrier schedule.
Curbside delivery is made to the curb, driveway, or nearest safe exterior location accessible by the freight truck.
Curbside delivery does not include:
- Moving the chair inside the home
- Stairs, upper floors, or room placement
- Unpacking or assembly
- Removal of boxes and packaging materials
The customer is responsible for arranging sufficient help and equipment to move the chair from the delivery location into the home.
White Glove Delivery
White Glove Delivery is available for an additional charge. Pricing and included services vary by chair model, delivery address, and local service provider.
- The chair is delivered through a local delivery and assembly provider
- The provider contacts the customer to arrange an appointment
- In-home delivery and assembly are provided according to the confirmed service level
- Stairs, room placement, unpacking, and packaging removal must be confirmed in advance
White Glove Delivery generally adds 7 to 10 days to the regular delivery estimate. All White Glove charges are non-refundable once the service has been arranged.
Alaska & Hawaii
Free shipping does not apply to Alaska or Hawaii. Please contact TITTAC before ordering to confirm available delivery options and receive a freight quote.
Inspect Your Delivery
Inspect the packaging and visible condition of the chair before signing the delivery receipt.
- Note all visible damage clearly on the delivery receipt
- Take photos of the packaging, shipping labels, damage, and receipt
- Contact TITTAC as soon as possible
- For severe damage, contact TITTAC before refusing delivery whenever possible
Signing without a damage notation may limit the ability to file a successful freight claim. Concealed damage or functional issues discovered after unpacking should be reported promptly.
30-Day Exchanges & Returns
A massage chair may be requested for exchange or return within 30 days from the purchase date. TITTAC approval and return instructions are required before the chair is shipped back.
Return for a Refund
- The customer is responsible for the original outbound freight cost
- The customer is responsible for return freight
- Applicable freight charges will be deducted from the refund
- White Glove Delivery charges are non-refundable
Exchange for Another Chair
- Price differences are adjusted according to the replacement chair
- Applicable freight charges are the customer's responsibility
- Higher- and lower-priced exchanges may have different freight treatment
- White Glove service for a replacement chair is charged separately
Returned chairs must be securely packaged for freight transport. The customer is responsible for damage caused by improper return packaging.
Refused or Undeliverable Shipments
Customers may be responsible for outbound freight, return freight, redelivery, storage, and any White Glove charges already incurred when delivery is refused without approval, an appointment is missed, or an incorrect or incomplete address is provided.
Questions About Delivery or Returns?
Contact TITTAC for White Glove pricing, Alaska or Hawaii freight quotes, delivery damage assistance, and exchange or return authorization.



